 Safety¶
Safety¶
In this menu the user can create checklists for each phase, avoid changing certain parameters, settings or programs and define safety bits lists.
Checklist¶
This feature is used to make sure that some requirements have been accomplished, for example, prior to a phase change or to avoid a possible malfunction.
These checklists will appear in a panel called Checklist of Veronte Ops (for more information about this, visit Veronte Ops manual).
Note
There are 3 different types of checks:
Checks that are performed automatically by Veronte 1x Autopilot, such as “In Range check”.
Checks that need a command to 1x Autopilot, e.g. “Calibrate Atmosphere”.
Checks for operator information only, which are performed with type “None”.
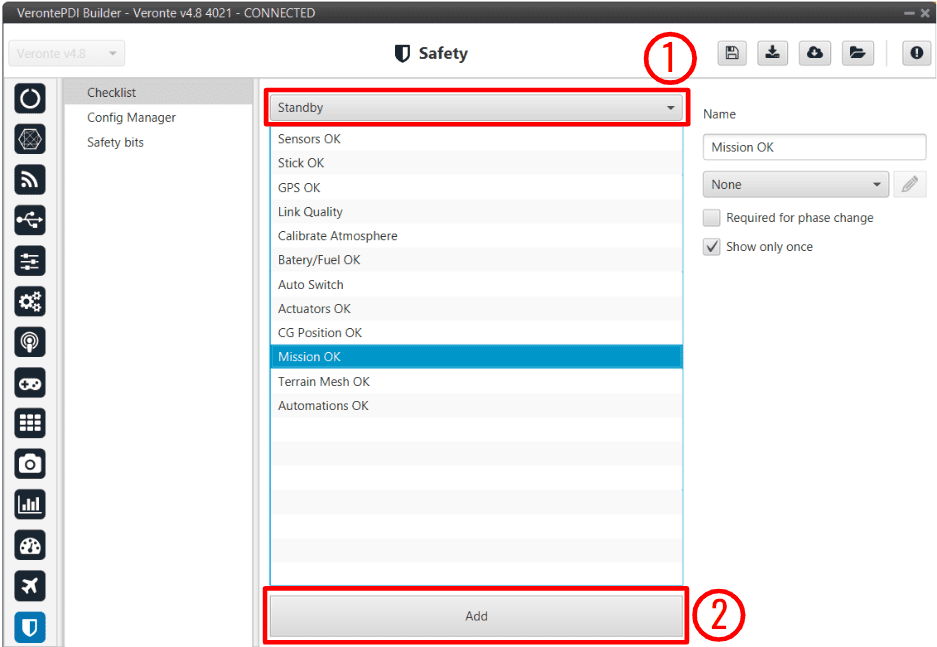
Checklist section¶
In (1), the user will find all the phases configured for the operation. In each one of them, new elements for the checklist can be added with the button Add (2). The user can modify the checklist order of the phase by selecting and dragging elements in the list to the desired position.
The configurable parameters for each element are:
Name: The name that will identify the element.
Type: The element chosen from the checklist can be one of the following types:
Calibrate Atmosphere: The user can request the calibration of the atmosphere model.
Calibrate DEM: The user can request the calibration of the DEM.
Command Position: Send to the UAV a position.
Command Yaw: Send to the UAV a yaw angle.
Enter Wind Information: Enter initial values for wind state to the UAV.
In Range Check: Allows checking if a variable is between the range selected.
None: Any action is performed, been just a check for the user to do something external.
Trim arcade: The user can request the stick calibration for arcade commands.
Required for phase change: If enabled, the element must be checked to switch to another phase.
Show only once: If enabled, the check will only appear the first time its phase is executed.
Automatic check: This option is only available when ‘In Range check’ is selected.
An example of ‘In Range Check’ can be shown below:
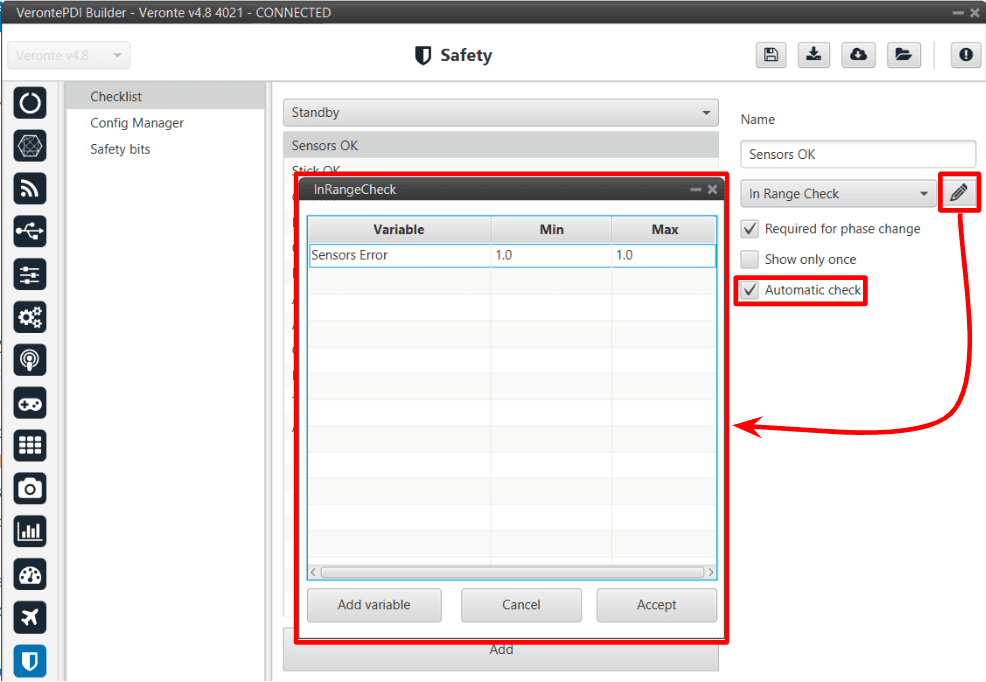
Checklist example¶
Config Manager¶
Config manager avoid the user changing certains parameters, settings or programs of 1x autopilot. It is shown in the picture below:
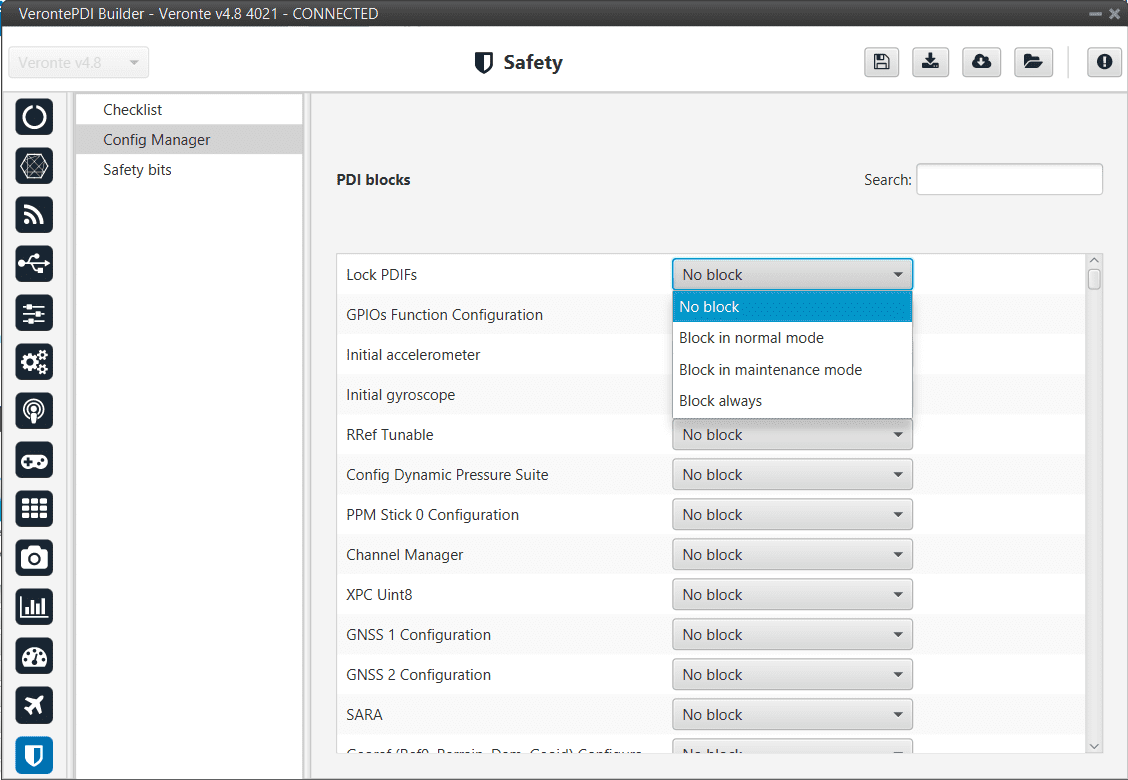
Config manager section¶
The user can choose between:
No block
Block in normal mode
Block in maintenance mode
Block always
Safety bits¶
In this section the user can configure 3 different safety bits lists.
The bits included in these lists are added to the set of default system bits that trigger the System error variable, and therefore trigger the FTS. The user can refer to this list of default system bits in the Activation System Error bits section of the 1x Software Manual.
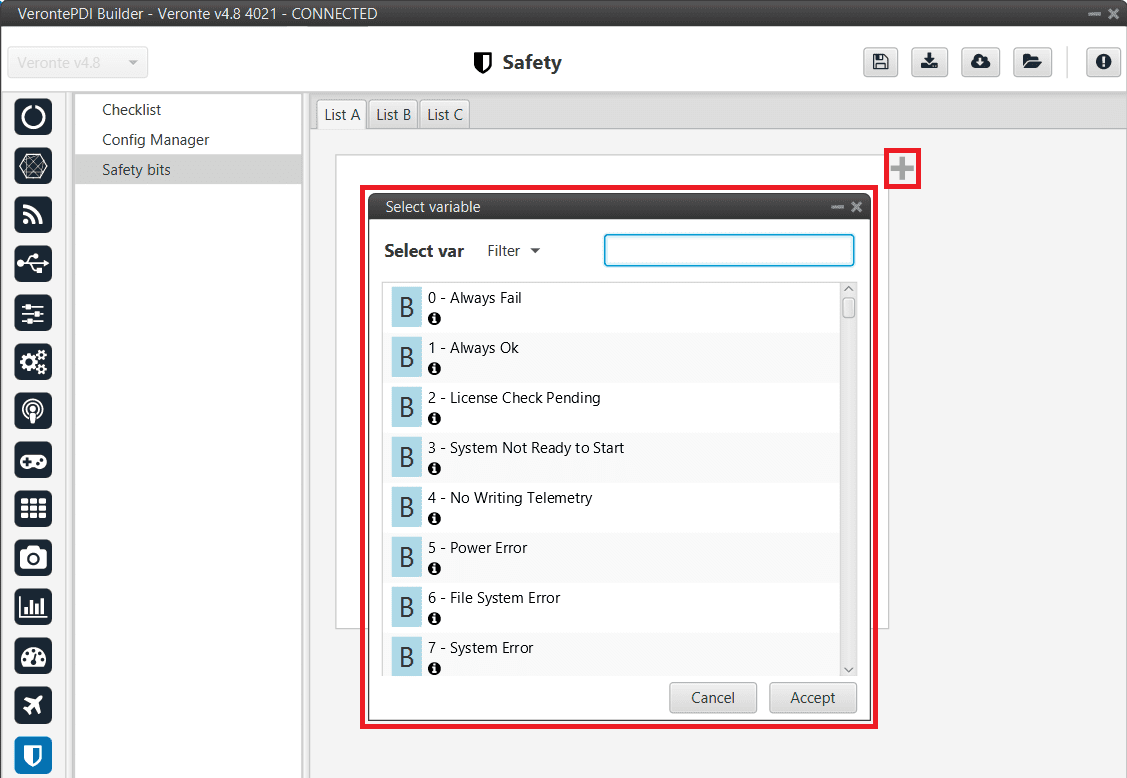
Safety bits section¶
By default, there is no bit defined in any Safety bits list. To add them, just press “+” icon and select the desired bits. A common user bit to add to these lists is the ‘Sensors error’ bit, so that if one of the sensors fails, the FTS is triggered.
In addition, the user can switch between the different lists with an action, see Actions of the Automations menu.